Development platform for robot programming and simulation
As part of several projects for a robotics company, I had the opportunity to gain extensive experience in the programming, simulation and testing of various robotic systems.
The initial project involved designing and implementing a server-based Python and C++ development environment that enables engineers to develop robotic applications and subsequently visualize and simulate them using dedicated robotics software.
The development environment was designed to meet the following requirements:
- Provide an integrated environment for robot programming and simulation
- Support robot development using the Robot Operating System (ROS) framework with Python and C++
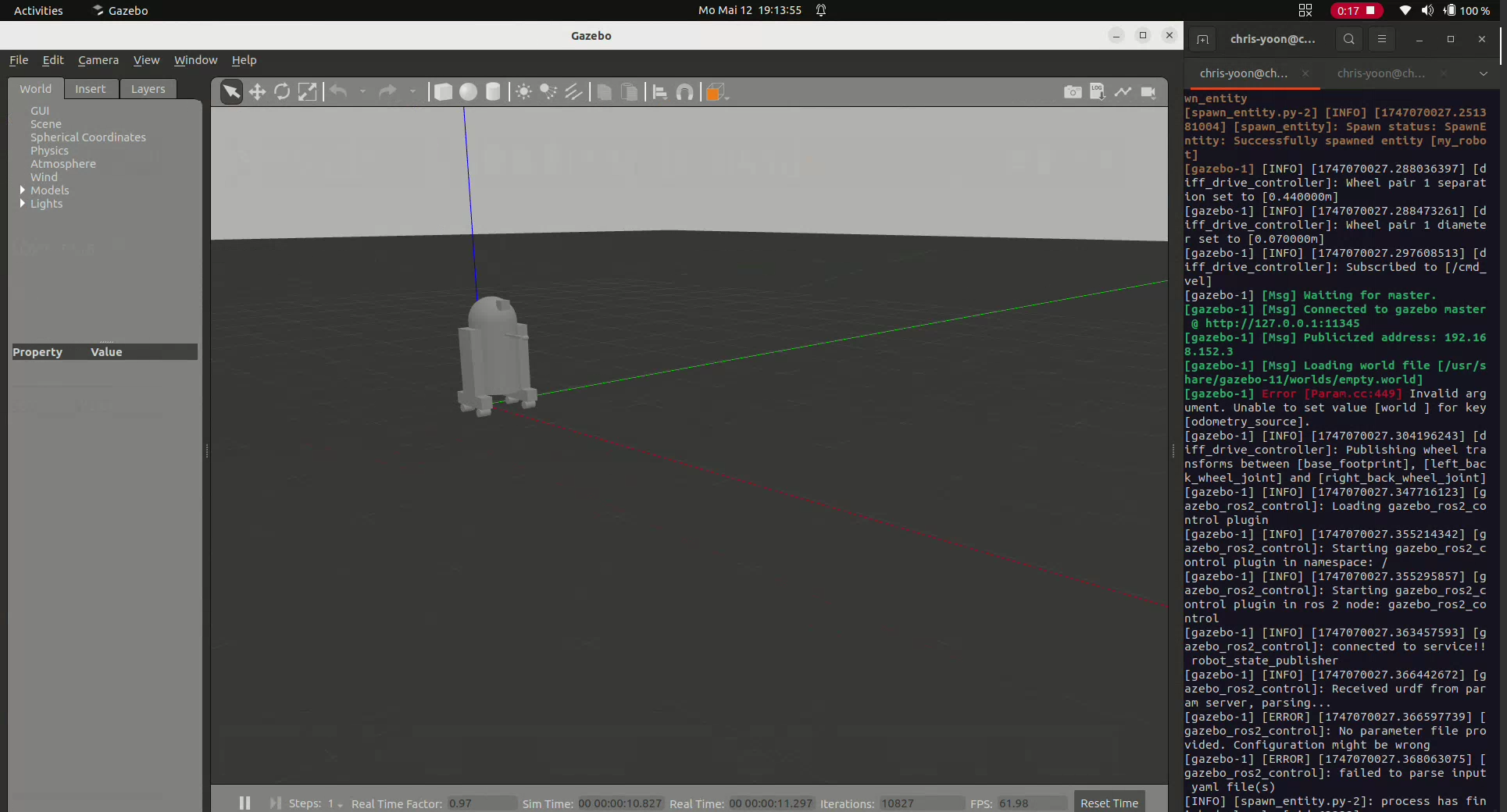
- Enable visualization, simulation and analysis of ROS applications using Gazebo
- Provide access to the development environment through virtual machines hosted on a central server
- Support centralized project creation, management, and environment control through a custom control system written in C
- Integrate development pipelines between local Git repositories, GitHub, and the server infrastructure
ROS (Robot Operating System) is a robotics middleware framework that serves as the communication layer between robot software and hardware, significantly simplifying the development of robotic systems. It provides a wide range of specialized packages for components such as camera systems, navigation, joystick control, localization, and sensor integration.
Gazebo is a physics-based simulation environment that enables realistic testing and evaluation of robotic systems under various operating conditions. It simulates physical phenomena such as gravity, mass, friction, collisions, motors, sensors, lighting, cameras, and LiDAR systems, allowing developers to validate robot behavior before deployment.
Follow-up Projects and Platform Extensions
Following the successful implementation of the development environment, several follow-up projects were carried out to extend the platform's functionality.
The first extension focused on developing an integrated testing and monitoring module. This module is automatically deployed whenever a new robotics project is created and provides a comprehensive framework for stability testing, performance monitoring, and automated validation.
The system automatically collects measurement data, applies standardized analysis procedures, and generates detailed test reports without manual intervention.
The testing framework supports the simulation and analysis of:
- Center of gravity
- Velocity
- Acceleration
- Braking behavior
- Turning radius
- Stability on different surface types
- Stability on various inclines
- External impacts
- Payload capacity
- and many additional performance metrics
Another project involved implementing and configuring several conversion tools capable of transforming CAD file formats into XML templates for URDF (Unified Robot Description Format) files used within the ROS development ecosystem.